Show code cell content
import matplotlib.pyplot as plt
import numpy as np
# Set the matplotlib output to svg
# from IPython.display import set_matplotlib_formats
# set_matplotlib_formats('svg')
import os
# check for set environment variable JB_NOSHOW
show = True
if 'JB_NOSHOW' in os.environ:
show = False
2.2. Computational Fluid Dynamics#
Overview#
The very general approach to numericaly solve a set of coupled PDEs is outlined in Fig. 2.11. In case of fluid dynamics, these are the equations introduced earlier. The numerical solution of those is called computational fluid dynamics (CFD).

Fig. 2.11 Overview of the general approach in computational fluid dynamics.#
The main aspect in solving PDEs is to approximate the involved derivatives. This approximation is carried out in a discretised domain and leads to a set of algebraic equations, eventually a system of linear equations. There exist multiple approximation approaches with different specialisations and properties, where these three are the most prominent ones:
As FDS is a FDM based solver, the main focus of this section is on the finite difference method. Yet, there will be also a few selected FVM aspects outlined.
Approximation of Derivatives#
Taylor Series#
The Taylor series can approximate any \(\mf C^\infty\) function at an expansion point \(\mf x_0\). The approximation of \(\mf f(x)\) is given in terms of \(\mf h\), being the coordinate variable in the vicinity of \(\mf x_0\).
In practice, the expansion is aborted at a given order \(\mf \mathcal{O}(h^n)\), where \(\mf n\) indicates the number of Taylor terms considered, i.e.
The expansion up to order three \(\mf \mathcal{O}(h^3)\) takes following form
Example of a Taylor expansion
As an example, the approximation of the function
at the evaluation point \(\mf x_0 = 2.0\).
Show code cell content
# definition of the example function and its analytical derivatives
def fnk(x, derivative=0):
if derivative == 1:
return 0.1 - 2*x * (1+x**2)**(-2)
if derivative == 2:
return -2 * (1+x**2)**(-2) + 8*x**2 * (1+x**2)**(-3)
if derivative == 3:
return 8*x * (1+x**2)**(-3) + 16*x * (1+x**2)**(-3) - 48*x**3 * (1+x**2)**(-4)
if derivative > 3:
return None
return 0.1*x + (1+x**2)**(-1)
Show code cell content
# set interval for x
xb = -1
xe = 5
# range of x values
x = np.linspace(xb, xe, 100)
f = fnk(x)
# evaluation point
x0 = 2.0
# derivative values at x0
f0p0 = fnk(x0, derivative=0)
f0p1 = fnk(x0, derivative=1)
f0p2 = fnk(x0, derivative=2)
f0p3 = fnk(x0, derivative=3)
# Taylor series for different orders
ts0 = f0p0 * (x-x0)**0
ts1 = ts0 + f0p1 * (x-x0)**1
ts2 = ts1 + 1/2 * f0p2 * (x-x0)**2
ts3 = ts2 + 1/6 * f0p3 * (x-x0)**3
# plot generation
alpha = 0.5
ylim = [0.3, 1.1]
plt.plot(x, f, lw=3, color='grey', label='f(x)')
plt.scatter(x0, f0p0, s=40, color='firebrick', zorder=3)
plt.legend()
plt.grid()
plt.xlabel('x')
plt.ylabel('f(x)')
plt.ylim(ylim)
plt.savefig('./figs/taylor_fnk.svg')
if show: plt.show()
plt.clf()
plt.plot(x, f, lw=3, color='grey', alpha=alpha, label='f(x)')
plt.plot(x, ts0, lw=2, color='C0', label='$\mathcal{O}(h^0)$')
plt.scatter(x0, f0p0, s=40, color='firebrick', zorder=3)
plt.legend()
plt.grid()
plt.xlabel('x')
plt.ylabel('f(x)')
plt.ylim(ylim)
plt.savefig('./figs/taylor_ts0.svg')
if show: plt.show()
plt.clf()
plt.plot(x, f, lw=3, color='grey', alpha=alpha, label='f(x)')
plt.plot(x, ts1, lw=2, color='C1', label='$\mathcal{O}(h^1)$')
plt.scatter(x0, f0p0, s=40, color='firebrick', zorder=3)
plt.legend()
plt.grid()
plt.xlabel('x')
plt.ylabel('f(x)')
plt.ylim(ylim)
plt.savefig('./figs/taylor_ts1.svg')
if show: plt.show()
plt.clf()
plt.plot(x, f, lw=3, color='grey', alpha=alpha, label='f(x)')
plt.plot(x, ts2, lw=2, color='C2', label='$\mathcal{O}(h^2)$')
plt.scatter(x0, f0p0, s=40, color='firebrick', zorder=3)
plt.legend()
plt.grid()
plt.xlabel('x')
plt.ylabel('f(x)')
plt.ylim(ylim)
plt.savefig('./figs/taylor_ts2.svg')
if show: plt.show()
plt.clf()
plt.plot(x, f, lw=3, color='grey', alpha=alpha, label='f(x)')
plt.plot(x, ts3, lw=2, color='C3', label='$\mathcal{O}(h^3)$')
plt.scatter(x0, f0p0, s=40, color='firebrick', zorder=3)
plt.legend()
plt.grid()
plt.xlabel('x')
plt.ylabel('f(x)')
plt.ylim(ylim)
plt.savefig('./figs/taylor_ts3.svg')
if show: plt.show()
plt.clf()
plt.plot(x, f, lw=3, color='grey', alpha=alpha, label='f(x)')
plt.plot(x, ts0, lw=2, color='C0', label='$\mathcal{O}(h^0)$')
plt.plot(x, ts1, lw=2, color='C1', label='$\mathcal{O}(h^1)$')
plt.plot(x, ts2, lw=2, color='C2', label='$\mathcal{O}(h^2)$')
plt.plot(x, ts3, lw=2, color='C3', label='$\mathcal{O}(h^3)$')
plt.scatter(x0, f0p0, s=40, color='firebrick', zorder=3)
plt.legend()
plt.grid()
plt.xlabel('x')
plt.ylabel('f(x)')
plt.ylim(ylim)
plt.savefig('./figs/taylor_all.svg')
if show: plt.show()
plt.clf()






<Figure size 432x288 with 0 Axes>
The following figures illustrate the according Taylor approximations for up to \(\mf n=3\).






Derivatives#
To approximate the first derivative of a function \(\mf f(x)\) at \(\mf x=x_0\), i.e. \(\mf f'(x_0)\), the Taylor expansion up to \(\mf n=2\) can be used
After rearrangemet, this results in the forward differentiation of first order
Thus with this formula, it becomes possible to approximate the value of the derivative based on two values of the function, here at \(\mf x_0\) and \(\mf x_0 + h\).
A graphical representation of equation (2.16) is shown below. It demonstrates the formula for \(\mf h=1\).
Show code cell content
# fix value of h
h = 1
# compute exact tangent function at x0
fp = f0p0 + f0p1*(x-x0)
# function value at x0+h
f_ph = fnk(x0 + h)
# compute difference in function values
# f0p0 is the function (p0) value at x0 (f0)
df_fwd = f_ph - f0p0
# compute line at (x0, f0) with approximated slope
fp_fwd = f0p0 + df_fwd/h*(x-x0)
# plot function f(x)
plt.plot(x, f, lw=3, color='grey', alpha=alpha, label='$\sf f(x)$')
# plot tangent of f(x) at x0
plt.plot(x, fp, color='C0', label="exact $\sf f'(x_0)$")
# plot line at x0, f(x0) with slope computed by forward difference
plt.plot(x, fp_fwd, color='C1', label="forward difference $\sf f'(x_0)$")
# indicate function evaluation points
plt.scatter([x0, x0+h], [f0p0, f_ph], color='grey', zorder=3)
plt.scatter(x0, f0p0, color='firebrick', zorder=3)
plt.ylim(ylim)
plt.grid()
plt.legend()
plt.xlabel('x')
plt.ylabel('f(x)')
plt.savefig('./figs/derivative_forward.svg');
if show: plt.show()
plt.close()


Fig. 2.12 First order forward difference formula.#
While the above formula used the value at \(\mf x_0 + h\) and is thus called a forward differences formula, it is possible to use the function’s value at \(\mf x_0 - h\). This results in the backward differences formula
Show code cell content
# function value at x0-h
f_nh = fnk(x0 - h)
# compite difference in function values
# f0p0 is the function (p0) value at x0 (f0)
df_bck = f0p0 - f_nh
# compute line at (x0, f0) with approximated slope
fp_bck = f0p0 + df_bck/h*(x-x0)
# plot function f(x)
plt.plot(x, f, lw=3, color='grey', alpha=alpha, label='$\sf f(x)$')
# plot tangent of f(x) at x0
plt.plot(x, fp, color='C0', label="exact $\sf f'(x_0)$")
# plot line at x0, f(x0) with slope computed by back difference
plt.plot(x, fp_bck, color='C2', label="backward difference $\sf f'(x_0)$")
# indicate function evaluation points
plt.scatter([x0, x0-h], [f0p0, f_nh], color='grey', zorder=3)
plt.scatter(x0, f0p0, color='firebrick', zorder=3)
plt.ylim(ylim)
plt.grid()
plt.legend()
plt.xlabel('x')
plt.ylabel('f(x)')
plt.savefig('./figs/derivative_backward.svg');
if show: plt.show()
plt.close()


Fig. 2.13 First order backward difference formula.#
First order approximations are mostly not sufficient and higher order approximations are needed. Using more values of the function, i.e. the combination of multiple Taylor series, higher order formula may be derived, like for the second order central differences formula.
The following two Taylor series are used as starting point
Subtracting the first equation from the second
results in the central difference formula for the first derivative
The central differences formula is graphicaly represented in the following figure.
Show code cell content
# compite difference in function values
# f0p0 is the function (p0) value at x0 (f0)
df_cnt = f_ph - f_nh
# compute line at (x0, f0) with approximated slope
fp_cnt = f0p0 + df_cnt/(2*h) * (x-x0)
# compute line at (x0+h, f(x0+h)) with approximated slope for illustration
fp_cnt_tmp = f_ph + df_cnt/(2*h) * (x-x0-h)
# plot function f(x)
plt.plot(x, f, lw=3, color='grey', alpha=alpha, label='$\sf f(x)$')
# plot tangent of f(x) at x0
plt.plot(x, fp, color='C0', label="exact $\sf f'(x_0)$")
# plot line at x0, f(x0) with slope computed by central difference
plt.plot(x, fp_cnt, color='C3', label="central difference $\sf f'(x_0)$")
plt.plot(x, fp_cnt_tmp, color='C3', alpha=0.3)
# indicate function evaluation points
plt.scatter([x0-h, x0, x0+h], [f_nh, f0p0, f_ph], color='grey', zorder=3)
plt.scatter(x0, f0p0, color='firebrick', zorder=3)
plt.ylim(ylim)
plt.grid()
plt.legend()
plt.xlabel('x')
plt.ylabel('f(x)')
plt.savefig('./figs/derivative_central.svg');
if show: plt.show()
plt.close()


Fig. 2.14 Second order central difference formula.#
All three presented methods are shown in a joint illustration in the next figure.
Show code cell content
# plot function f(x)
plt.plot(x, f, lw=3, color='grey', alpha=alpha, label='$\sf f(x)$')
# plot tangent of f(x) at x0
plt.plot(x, fp, color='C0', label="exact $\sf f'(x_0)$")
# lines indicating the slope approximations
plt.plot(x, fp_fwd, color='C1', label="forward difference $\sf f'(x_0)$")
plt.plot(x, fp_bck, color='C2', label="backward difference $\sf f'(x_0)$")
plt.plot(x, fp_cnt, color='C3', label="central difference $\sf f'(x_0)$")
plt.plot(x, fp_cnt_tmp, color='C3', alpha=0.3)
# indicate function evaluation points
plt.scatter([x0-h, x0, x0+h], [f_nh, f0p0, f_ph], color='grey', zorder=3)
plt.scatter(x0, f0p0, color='firebrick', zorder=3)
plt.ylim(ylim)
plt.grid()
plt.legend()
plt.xlabel('x')
plt.ylabel('f(x)')
plt.savefig('./figs/derivative_all.svg');
if show: plt.show()
plt.close()


Fig. 2.15 Comparison of all above presented difference formula.#
It is also possible to derive directional (forward, backwards) formulas second order. The calculus leads to the follwoing formulas
Task
Derive the discretisation formula for the second derivative
Discretisation#
In the above section, the derivative of a function was approximated at a single point, here \(\mf x_0\). In order to compute the derivative of a function in a given interval \(\mf x \in [x_b, x_e]\), a common approach is to discretise the interval. This means, that it is represented by a finite number of points. Given \(\mf n_x\) as the number of representing points, the interval becomes the following finite set:
with
If the representing points are equally spaced, then the distance \(\mf \Delta x\) is
and the value of \(\mf x_i\) is given by
In two and three dimensional cases, this discretisation can be represented as a mesh or grid, see Fig. 1.21. Thus \(\mf \Delta x\) is often called grid spacing.
A common indexing for spatially discretised functions is
where the index indicating the position on the spatial mesh is placed as a subscript.
The above definitions and the following examples are for a one-dimensional setup. In general, fire simulations are solved on a three-dimensional domain, with the according quantities for the y- and z-direction, i.e. \(\mf \Delta y, \Delta z\).
Example of a discretisation: Given \(\mf n_x = 20\), the function in equation (2.14) takes the following discrete representation.
Show code cell content
nx = 20
dx = (xe - xb) / (nx - 1)
xi = np.linspace(xb, xe, nx)
fi = fnk(xi)
plt.plot(x, f, lw=2, color='C0', alpha=0.3, label='continuous $\sf f(x)$')
plt.scatter( xi, fi, color='C0', zorder=5, label='discretised $\sf f(x_i)$')
# plt.vlines( xi, [0] * len(xi), fi, color='grey', alpha=0.3)
# line at y=0
# plt.axhline(0, color='black')
plt.legend()
plt.grid()
plt.xlabel('x')
plt.ylabel('f(x)')
plt.ylim(ylim)
plt.savefig('./figs/discretisation.svg')
if show: plt.show()
plt.clf();

<Figure size 432x288 with 0 Axes>

Fig. 2.16 One dimensional discretisation.#
Discrete Derivatives#
Given the approximation formulas and a discretised function, it becomes possible to compute the function’s derivative only with the usage of its values. The approximation formulas are evaluated with \(\mf h = \Delta x\).
For the function shown above and using the central differences second order (2.20), plus the directional derivatives (2.21) at the boundaries, the approximated derivative is shown in the following figure.
Show code cell content
# function to compute the first derivative with the
# central differencing scheme
def central(x, y):
yp = np.zeros_like(y)
for i in range(1, len(x)-1):
# central discretisation scheme
yp[i] = (y[i+1] - y[i-1]) / (x[i+1] - x[i-1])
# use of directional derivatives at the boundary
yp[0] = (-3*y[ 0] + 4*y[ 1] - y[ 2]) / (x[ 2] - x[ 0])
yp[-1] = ( 3*y[-1] - 4*y[-2] + y[-3]) / (x[-1] - x[-3])
return yp
Show code cell content
# analytical solution of the derivative for comparison
fp = fnk(x, derivative=1)
# approximation of the derivative
fpi = central(xi, fi)
# plot of the function
plt.plot(x, f, lw=2, color='C0', alpha=0.3, label='exact $\sf f(x)$')
plt.scatter( xi, fi, color='C0', zorder=5, label='discretised $\sf f(x_i)$')
# plot of the derivative
plt.plot(x, fp, lw=2, color='C1', alpha=0.3, label="exact $\sf f'(x)$")
plt.scatter( xi, fpi, color='C1', zorder=5, label="approximation $\sf f'(x_i)$")
plt.legend()
plt.grid()
plt.xlabel('x')
plt.ylabel('f(x)')
# plt.ylim(ylim)
plt.savefig('./figs/discrete-derivative.svg')
if show: plt.show()
plt.clf();

<Figure size 432x288 with 0 Axes>

Fig. 2.17 Approximation of the first derivative.#
Task
Create a plot similar to Fig. 2.17 for the function
Discretise the function with \(\mf n_x = 20\) between -2 and 4 and plot the continouos and discrete representation.
Use this discretasition to approximate the first derivative. Plot the exact and approximated derivative.
Do the same for the second derivative.
Approximation Error#
If the exact derivative is known, then the exact deviation of the numerical approximation to the exact values can be computed. A common approach to compute the difference between two data sets is the L2-norm or the root mean square error (RMSE). Given the difference of the function values \(\mf \Delta f\), here
at the same locations \(\mf x_i\) with \(\mf i \in [0, \dots, n_x-1]\), the RMSE value is
For the example function of the previous section, the approximation error can be computed for various values of \(\mf \Delta x\), as shown in the following figure. As expected for the second order approximation scheme, the error behaves similar to a quadratic function. However, due to the finite representation of floating point numbers, the convergence stops, when round-off error start to dominate.
Show code cell content
dx_list = []
rmse_list = []
for nxe in range(3, 25):
nx = 2**nxe
dx = (xe - xb) / (nx - 1)
xi = np.linspace(xb, xe, nx)
fi = fnk(xi)
fpi = central(xi, fi)
fp = fnk(xi, derivative=1)
rmse = np.sqrt(np.sum((fpi - fp)**2) / nx)
print(f"dx={dx:4.2e} --> rmse={rmse:4.2e}")
dx_list.append(dx)
rmse_list.append(rmse)
dx=8.57e-01 --> rmse=2.12e-01
dx=4.00e-01 --> rmse=4.72e-02
dx=1.94e-01 --> rmse=1.03e-02
dx=9.52e-02 --> rmse=2.55e-03
dx=4.72e-02 --> rmse=6.33e-04
dx=2.35e-02 --> rmse=1.57e-04
dx=1.17e-02 --> rmse=3.92e-05
dx=5.87e-03 --> rmse=9.80e-06
dx=2.93e-03 --> rmse=2.45e-06
dx=1.47e-03 --> rmse=6.12e-07
dx=7.33e-04 --> rmse=1.53e-07
dx=3.66e-04 --> rmse=3.82e-08
dx=1.83e-04 --> rmse=9.55e-09
dx=9.16e-05 --> rmse=2.39e-09
dx=4.58e-05 --> rmse=5.97e-10
dx=2.29e-05 --> rmse=1.49e-10
dx=1.14e-05 --> rmse=3.74e-11
dx=5.72e-06 --> rmse=1.09e-11
dx=2.86e-06 --> rmse=1.14e-11
dx=1.43e-06 --> rmse=1.99e-11
dx=7.15e-07 --> rmse=4.57e-11
dx=3.58e-07 --> rmse=8.91e-11
Show code cell content
plt.loglog(dx_list, rmse_list, color='C0', marker='o', linestyle='None', label='computed')
plt.loglog(dx_list, rmse_list, color='C0', alpha=0.3)
dx_np = np.array(dx_list)
plt.loglog(dx_list, dx_np**2, color='grey', alpha=0.8, label='$\sf \sim\Delta x^2$')
plt.grid()
plt.legend()
plt.xlabel("$\sf\Delta x$")
plt.ylabel("$\sf RMSE $")
plt.savefig('./figs/approximation_error.svg')
if show: plt.show()
plt.clf()

<Figure size 432x288 with 0 Axes>

Fig. 2.18 Approximation error as a function of the mesh spacing.#
Task
Why does the approximation error not reduce further for \(\mf \Delta x \lesssim 5\cdot 10^{-6}\)? Take into account equation (2.20) and the round off error for 64-bit floating point numbers.
Time Integration#
Trajectories#
As the PDEs that are considered in fluid dynamics often contain the time as one dimension, time integration is another aspect besides the spatial derivatives.
In a similar fashion as the spatial discretisation, the time dimension is discretised. Thus, the time interval \(\mf [t_b=0, t_e]\) is split into \(\mf n_t\) time steps:
In order to distinguish the time index from the spatial index, it is placed as a superscript and is not to be mixed with powers:
Given the time derivative of a function, i.e. the right hand side (rhs),
and an initial value for \(\mf u\) at \(\mf t=0\), the temporal evolution, also called trajectory, needs to be computed. Time integration aims to approximate the next value of the solution \(\mf u^{n+1}\).
In the following the evaluation point of rhs is shortened to

Fig. 2.19 Time Integration.#
Explicit Euler Method#
Based, again on the Tayor series, a direct approximation of the solution’s next value is based on
It leads directly to
The equation (2.23) is the explicit / forward Euler method. It is graphicaly demonstrated in Fig. 2.20.

Fig. 2.20 Time integration – explicit Euler scheme.#
Implicit Euler Method#
The evaluation of the derivative in (2.23) at \(\mf t_n\) is just one possibility. In the same mannor as the directional spatial derivatives, the evaluation can be done at \(\mf t_{n+1}\) and leads to the folowing iteration formula:
The equation (2.24) is the implicit / backward Euler method. It is graphicaly demonstrated in Fig. 2.21. It is an implicit approach, in contrast to the explcit Euler scheme, which does not allow to directly compute the next iteration step based only on the solution of the current values \(\mf u^n\). However, as the \(\mf rhs\) can be computed for any value of \(\mf u\), a matching value of \(\mf u^{n+1}\) can be found to satisfy equation (2.24).

Fig. 2.21 Time integration – implicit Euler scheme.#
Euler-Heun Method#
The Euler-Heun method illustrates a second order time integration scheme.
First, an explicit prediciton is done
This intermediate solution is used for a corrected approximation

Fig. 2.22 Time integration – Euler-Heun predictor-corrector scheme.#
Runge-Kutta method(s)#
There exists a wide range of time integration schemes. One class of them are the Runge-Kutta methods. The classical scheme is the following fourth order method:
Finite Difference Method#
Solution Approach#
Consider a simple diffusion equation:
Forward Euler: This scheme can be directly – explicitly – evaluated.
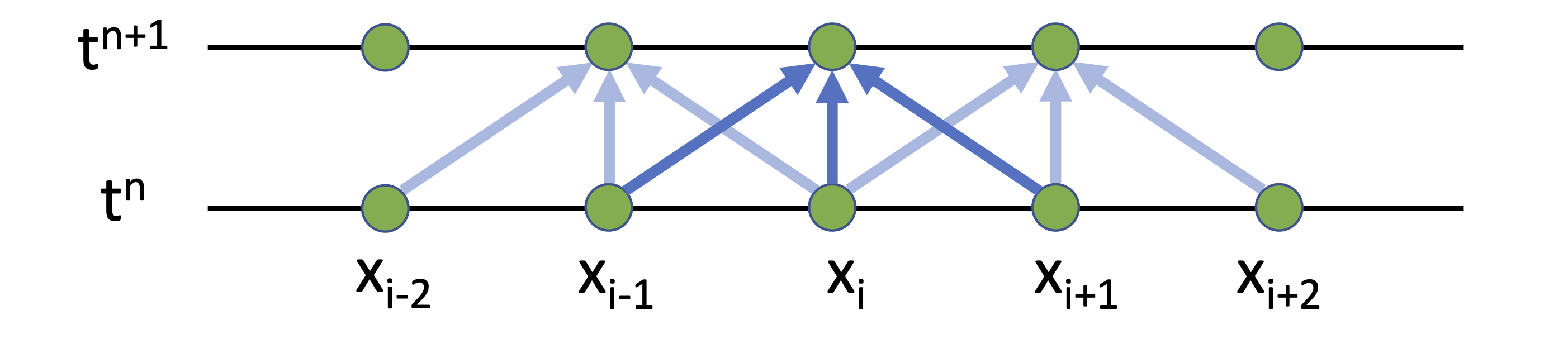
Fig. 2.23 Explicit Euler scheme.#
Backward Euler: Here a linear equation system must be solved for \(\phi^{n+1}\).”

Fig. 2.24 Implicit Euler scheme.#
Stability#
Information Propagation#
An important property of a time integrator is its stability. Given a PDE to be solved and a time integrator, a simple (linear) stability analysis can be conducted, e.g. von Neuman stability analysis. The outcome is the growth factor, which indicates the growth rate of small disturbances. If this factor is larger then 1, then the scheme is unstable, as fluctuations will infinitely rise.
Explicit schemes tend to be unstable or conditionally stable, i.e. if a condition for the time step is met
Implicit schemes tend to be unconditionally stable, however they tend to damp the solution
A constant velocity advection problem demonstrates the stability condition.
Slow propagation speed
Model equation
\[ \mf \partial_t \phi + \partial_x(v_0\phi) = 0 \]Small \(\mf \Delta t\)
Distance traveled per \(\mf \Delta t\):
\[ \mf \delta x = v_0 \Delta t \lt \Delta x \]The information moves less then \(\mf\Delta x\) in a time step \(\mf\Delta t\) and is captured by the neighbouring grid point
No solution information is lost during time integration
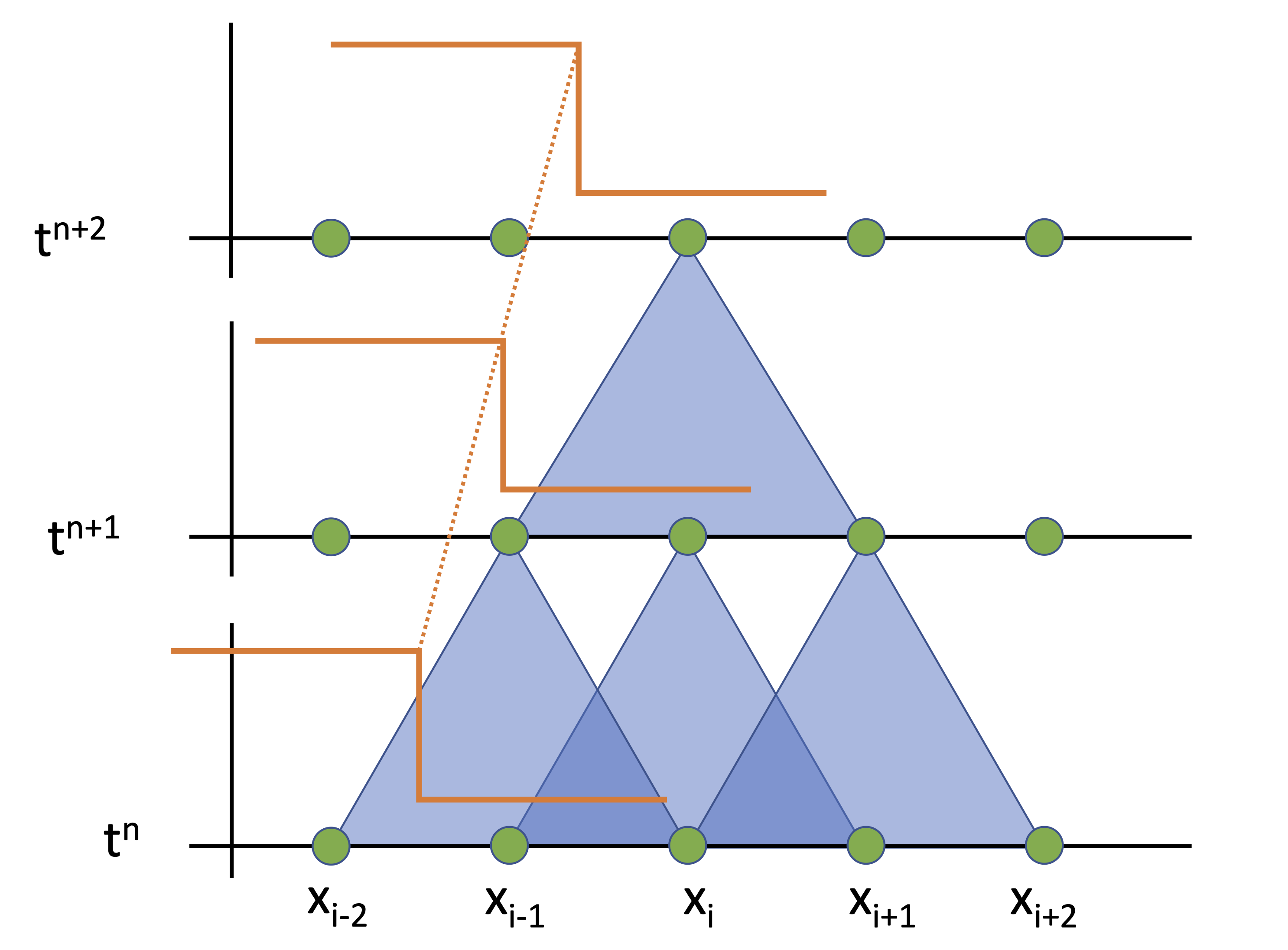
Fig. 2.25 Slow information propagation.#
Fast propagation speed
Large \(\mf\Delta t\)
Distance traveled per \(\mf\Delta t\):
\[ \mf \delta x = v_0 \Delta t \gt \Delta x \]The information moves more then \(\mf \Delta x\) in a time step \(\mf\Delta t\) and can therefore not be captured anymore
Information is lost during time integration
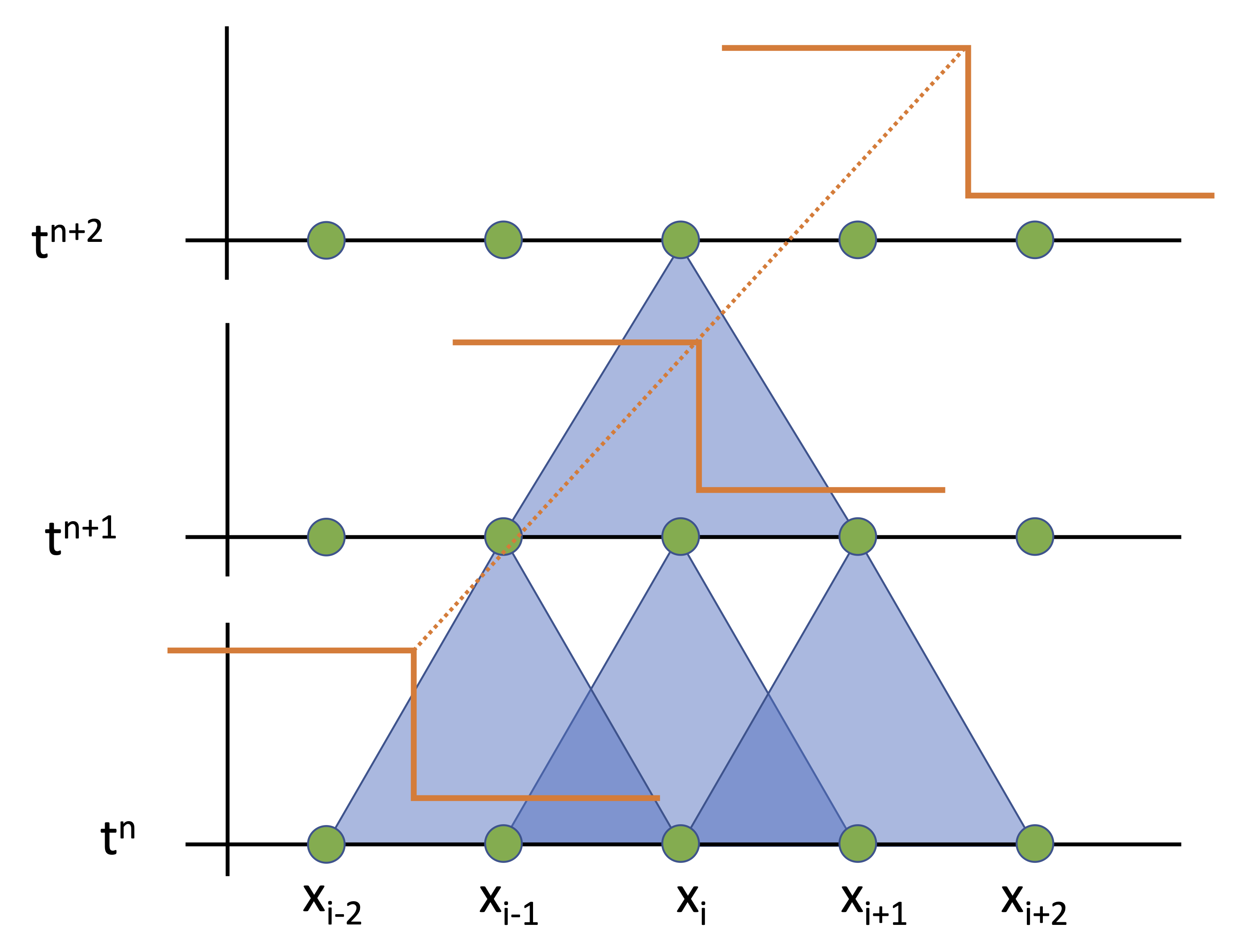
Fig. 2.26 Fast information propagation.#
Courant-Friedrichs-Lewy (CFL) condition#
In general, there exist stability conditions for explicit schemes, which relates the maximal information travel speed \(\mf v_{max}\) and the grid velocity \(\mf v_g = \Delta x / \Delta t\):
Given a mesh resolution \(\mf\Delta x\) and maximal velocities, the above condition limits the time step:
Notes:
The flow velocity may be computed in various ways (\(\mf L_\infty\), \(L_1\), \(L_2\) norms), diffusion velocity \(\mf \propto 1/\Delta x\)
There also exist other constrains on \(\mf Delta t\): mass density constraint and volume constraint.
The value of the CFL number depends on the time integration scheme.
Implications of the CFL condition in FDS:
The condition for \(\mf \Delta t\) used in FDS is
If the CFL number grows above the upper limit, the time step is set to 90% of the allowed, if it falls below the lower limit, then it is increased by 10%.
In general, the time step is reduced by a factor of 2 when the mesh spacing is reduced by a factor of 2, i.e. the total computational effort increases by a factor of 16.
Side note on how computation was performed in the past#
Short section from Richard Feynmans presentation “Los Alamos from Below”. He describes how numerical calculations were performed by individual people per grid node and type of computation.